










Cesta k autonomní mobilitě je trnitá. Aktuálně se například ukazuje, že některá dílčí řešení, již běžně využívaná, mají své limity, případně by potřebovala zásadní vylepšení. To je i případ současné podoby adaptivního tempomatu, tedy samočinného udržování vzdálenosti od vpředu jedoucího auta.
Adaptivní tempomat (ACC) je prvním stupněm autonomní mobility a jedním z jejích základních prvků. V době uvedení šlo o revoluční počin, zvyšující bezpečnost i komfort řidiče. Jenže nyní se ukazuje, že jeho současná podoba má své limity, které mohou při určité shodě okolností vyústit až ke vzniku dopravní komplikace, případně kritické situace.
Problém spočívá v takzvané řetězové nestabilitě. To je termín, popisující reakci lidských řidičů na náhle vzniklou situaci. Pokud v jedoucí, ale souvislé koloně aut jedno mírně přibrzdí, druhé za ním přibrzdí o něco více, třetí ještě více atd. X-té auto pak rovnou zastaví a vznikne bezdůvodná (fantomová) dopravní zácpa, známá i pod termínem spontánní kongesce.
Tento jev měly odstranit adaptivní tempomaty, dávkující brzdný účinek racionálně, bez emocí. Tiskovou zprávu v tomto smyslu před časem vydal třeba Ford. Jenže vědecký tým docenta Zdeňka Huráka z katedry řídicí techniky Fakulty elektrotechnické ČVUT teoretickými výpočty zjistil, že tomu tak nemusí být za všech okolností. Konkrétně když za sebou pojede více automobilů se zapnutým ACC (tedy situace, která s rozšiřováním této technologie i do nižších tříd bude nastávat čím dál častěji), může k řetězové nestabilitě rovněž dojít. Unikátního experimentu, který měl tyto výpočty potvrdit, jsme se zúčastnili a s námi dalších jedenáct posádek. Většinou šlo o dobrovolníky, kteří se přihlásili na veřejnou výzvu. V testovací koloně se tak sešla velmi různorodá auta rozličných tříd včetně dvou elektromobilů a BMW M5.
 Adaptivní tempomaty většiny aut reagovaly velmi podobně, v tomto ohledu nebyl rozdíl mezi Hyundaiem Kona a BMW M5 Competition
Adaptivní tempomaty většiny aut reagovaly velmi podobně, v tomto ohledu nebyl rozdíl mezi Hyundaiem Kona a BMW M5 CompetitionModelová situace se podobá reálnému provozu: Vpředu jedoucí vůz plynule zpomalí z rychlosti 60 km/h na padesátku a poté, co všechny vozy v koloně této rychlosti rovněž dosáhnou, zrychluje se zpět na šedesát. Adaptivní tempomaty jsou nastavené na 80 km/h a u vozů s volitelnými provozními režimy se nastavuje mírnější, případně prostřední režim. V každém voze seděl člen experimentálního týmu s GPS, notebookem s datovým připojením a vysílačkou. Protože se počítalo s tím, že experiment může vyvolat i situaci, jejíž zvládnutí je mimo schopnosti ACC (a na tuto možnost jsme byli upozorněni), dostala každá posádka přesné instrukce, co v takové situaci dělat, včetně šipky, na kterou stranu se má eventuálně vyhnout. Naštěstí k žádné krizové situaci nedošlo, jen jsme si (nad rámec tohoto experimentu) několikrát ověřili, že úzký záběrový úhel dalekodosahového radaru, jímž se ACC řídí, může v ostré zatáčce vést k nečekanému zrychlování vozu, který ztratí ze zřetele vpředu jedoucí vůz. Má to podobný důvod jako předmět celého experimentu.
 Experiment mimo jiné dokázal, že technika má do opravdové autonomie ještě hodně daleko. Některé její prvky nám ale mohou hodně pomáhat i dnes
Experiment mimo jiné dokázal, že technika má do opravdové autonomie ještě hodně daleko. Některé její prvky nám ale mohou hodně pomáhat i dnesZdánlivě banální úkon vpředu jedoucího vozidla má překvapivé následky: Zatímco vedoucí Mondeo s organizátory zpomaluje z šedesáti na padesát a následně zrychluje zpět zcela plynule a dvě tři auta za ním rovněž, dále se rychle zvyšuje rozkmit. My jsme jezdili s Hyundaiem Kona Hybrid jedenáctí a první zpomalení už jsme pociťovali jako poměrně dramatickou a ostrou deceleraci někam na rychlost pod 30 km/h. Tím se ale zvětšil odstup od vpředu jedoucích aut, který následně vůz opět velmi dynamickou akcelerací až k nastavené osmdesátce zkrátil, přičemž dojíždění k pomaleji jedoucím vozům už probíhalo plynule. Opětovné zrychlení na šedesátku už se obešlo bez panického brzdění, avšak dynamické zrychlování na osmdesátku kvůli dohnání ztráty se opakovalo. Řetězová nestabilita ve své nejryzejší podobě.
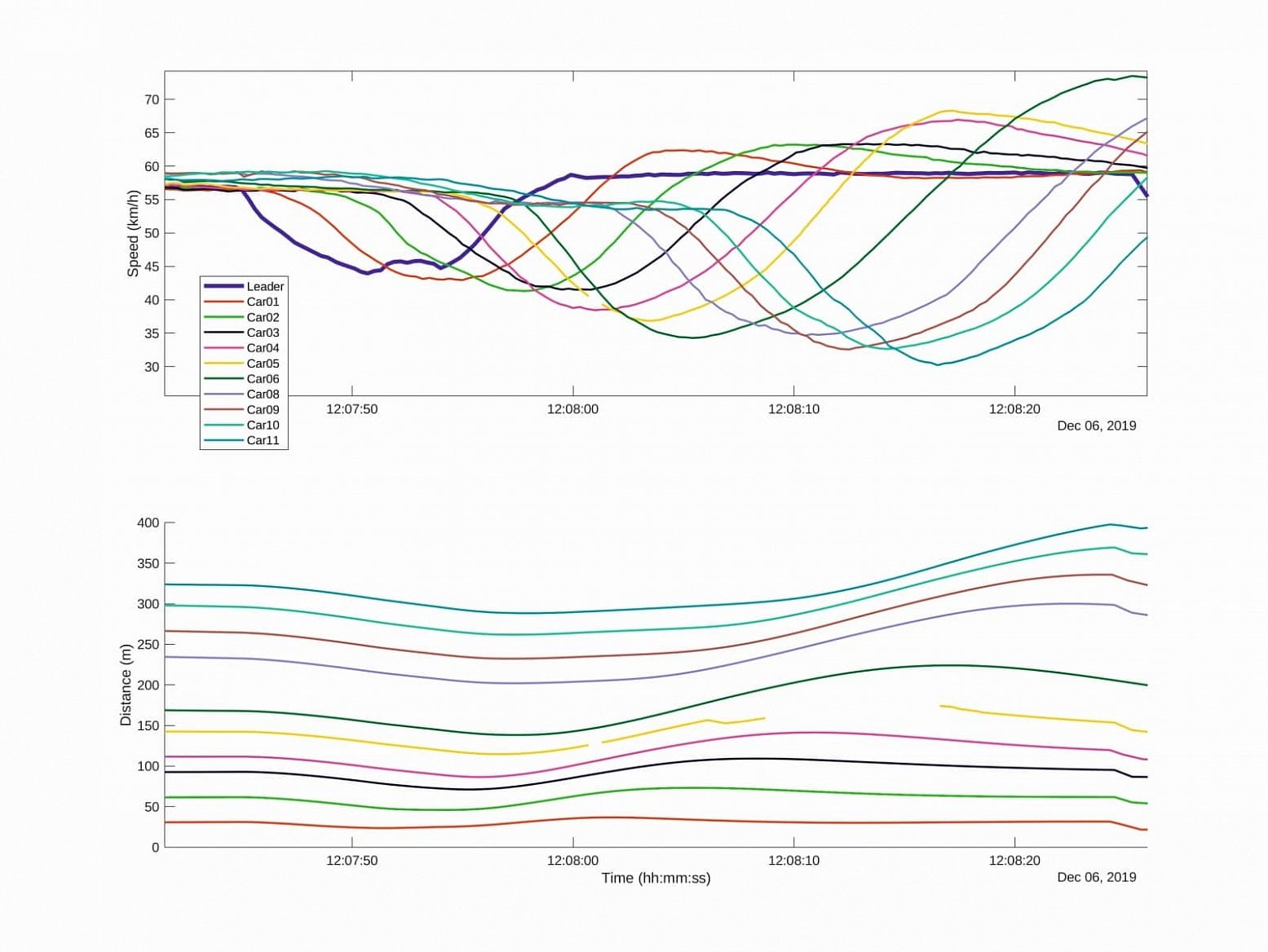
Nutno dodat, že dvoukilometrová pojížděcí dráha mnichovohradišťského mezinárodního letiště, kde se experiment konal, stačila dvanácti vozům k dokončení obou zdánlivě banálních úkonů tak tak. Aby došlo k signifikantnějším výsledkům a třeba i zastavení posledních aut při větších rozdílech rychlostí či s početnější kolonou, k tomu už by byla potřeba násobně delší testovací trať. Pokus, jehož výsledky názorně zobrazuje graf, se několikrát opakoval s obdobnými výsledky. A lze tak konstatovat, že teoretické výpočty docenta Huráka a jeho kolegů byly experimentálně potvrzeny.
Experiment neměl za cíl porovnávat reakce člověka s reakcemi ACC, jak zdůrazňuje tým docenta Huráka, ani vzájemně porovnávat jednotlivá ACC. Nebyla provedena náročná měření jednotlivých vozů, která by ukázala, zda některé adaptivní tempomaty přispívají ke vzniku řetězové nestability více než jiné. Možné to je. Cílem bylo získat další data k vývoji přesnějších modelů, popisujících dynamiku vozů s adaptivními tempomaty.
Se současnou technikou už o mnoho více pro odstranění řetězové nestability dělat nelze. To bude práce až pro příští generaci tzv. kooperativních adaptivních tempomatů (CACC), na jejichž vývoji se intenzivně pracuje a jejichž prototypy jsou již v experimentálním prostředí testovány. Ty však předpokládají zprovoznění, standardizaci a také dostatečnou penetraci systémů car to car a car to X, což bude ještě nějakou dobu trvat.

Proto je možné leccos udělat už dnes, kromě v textu zmíněné automatické regulace rychlosti podle profilu trasy by se také ACC měly brzy naučit rozpoznávat brzdová světla vpředu, kamera už je dnes ostatně prakticky samozřejmou součástí výstroje naprosté většiny nových aut (a některé systémy ACC používají kameru i jako hlavní zdroj provozních dat místo radaru, laseru i lidaru). Tím by se sice neodstranila samotná řetězová nestabilita, znázorněná na horním grafu s rychlostními profily jednotlivých aut během experimentu, ale výrazně by se rozšířily možnosti ACC k plynulejší regulaci zpomalování na větší vzdálenosti.
Co to vlastně znamená? Technologie, donedávna drahá a exkluzivní, nyní však rychle pronikající i mezi levná auta, má zjevně limity, které mohou být v extrémním případě i nebezpečné; při určité míře řetězové nestability a nešťastné souhře dalších okolností by se mohlo reálně stát, že vzadu jedoucí vozy samočinně nedobrzdí včas. To je krajní scénář, avšak fantomovou dopravní zácpu mohou za sebou jedoucí adaptivní tempomaty vytvořit podobně jako lidští řidiči. Není třeba panikařit a hned přestat používat adaptivní tempomat; že se v běžném provozu sejde dejme tomu deset či více za sebou jedoucích aut s aktivním ACC, je zatím ještě vysoce nepravděpodobné. A že zároveň dojde k souhře náhod, které by mohly vést ke kritické situaci, to už je mizivá pravděpodobnost. Jenže existuje.

Problém je v tom, že ACC ve své současné podobě prostě měří vzdálenost před sebou a na základě algoritmů samočinně zrychluje či zpomaluje. Nic víc. Prostě mu chybí předvídavost, případně informace o tom, co se vpředu děje dále než na dosah jeho radaru, eventuálně před autem, které samo následuje. Předvídat se (na rozdíl od člověka) jen tak nenaučí, avšak data může získávat i jinak. Někteří výrobci (například Volkswagen) už nabízejí automatickou regulaci rychlosti podle navigačních dat, což je první krok správným směrem. Takové zařízení by mohlo třeba dojít k závěru, že když vpředu jedoucí auto v ostré zatáčce zmizí z radaru, nemusí to znamenat, že opravdu zmizelo. A že obecně prudké zrychlování v ostré zatáčce nemusí být dobrý nápad. Absolutním řešením bude propojení s decentralizovanou bezdrátovou komunikací mezi auty car to car (V2V), případně aut s infrastrukturou car to X, která se již několik let intenzivně testuje, zatím však není nabízena. Tým z ČVUT každopádně experimentálně dokázal, že naděje k potlačení nebezpečné řetězové nestability větším rozšířením ACC byly liché.
Foto: David M. Bodlák